The current skidpad planner is using python with the aid of the following libraries:
- numpy
- matplotlib
| Rotated Skidpad | Random Starting Position |
|---|---|
 |
 |
- Convert python code to C++
- Create a node to test new algorithm with real data
New node to test the algorithm with real time data will follow the architecture:

- Install C/C++ extension for VS code:
ms-vscode.cpptools
- Install the latest installer from the MSYS2 page link here.
- After install, run this command to install MinGW-w64 toolchain:
pacman -S --needed base-devel mingw-w64-ucrt-x86_64-toolchain- Press
Enterto proceed - Press
yto proceed
- Press
Edit environment variableto point to compiller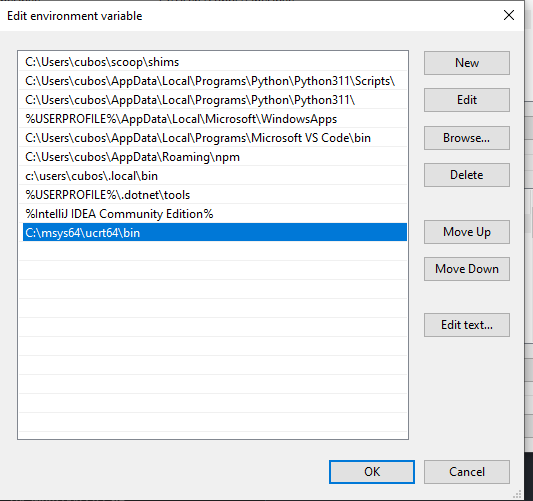
C/C++ Sleect IntelliSense Configurationand then selectUse gcc.exe


And these are the steps to setup your C++ compiller in VScode.